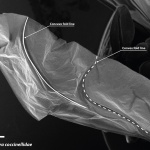
ITECH Research Demonstrator 2018-19 by University of StuttgartA large-scale compliant architecture inspired by the folding mechanisms of the Ladybug wings 2019-07-31 Project SpecsDesign:University of StuttgartLocation: Germany Type: Architecture Materials: fibreglass Fibers High-tech & innovative materials carbon fibres Tags: Stuttgart Category: Pavilion installation 版权️©谷德设计网gooood.cn,禁止以gooood编辑版本进行任何形式转载Copyright©goooodClick to contact with the designer/authorUniversity of StuttgartRecommended Jobs Submit a JobAll Jobs »Latest Jobs Submit a JobAll Jobs » Post a Comment You need to login to post comment Social LoginPreviousPanorama by ACDF ArchitecturePanorama by ACDF ArchitectureNextStone House by NOMO STUDIOStone House by NOMO STUDIOLatest Pantanal Biopark by Ruy Ohtake Arquitetura e Urbanismo Ltda. Pantanal Biopark by Ruy Ohtake Arquitetura e Urbanismo Ltda. Random Jobs Submit your jobAll jobs »Jobs Post positions» Sort by districtsAll|Northern China|Middle China|Southern China