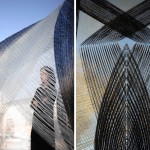
ICD/ITKE Research Pavilion 2012 by University of StuttgartExploring the relationship between bionic design and emerging robot production. 2013-03-08 Project SpecsDesign:University of StuttgartLocation: Germany Type: Architecture Materials: Synthetic material Resin fibreglass Technology carbon fibres Tags: 3D Print Stuttgart Category: Parametric design Exhibition Architecture Pavilion Culture Architecture 版权️©谷德设计网gooood.cn,禁止以gooood编辑版本进行任何形式转载Copyright©goooodClick to contact with the designer/authorUniversity of StuttgartRecommended Jobs Submit a JobAll Jobs »Latest Jobs Submit a JobAll Jobs » Post a Comment You need to login to post comment Social LoginPreviousgooood Interview NO.4--- Ben van Berkelgooood Interview NO.4--- Ben van BerkelNextHIDE by Tove GreitzHIDE by Tove GreitzLatestThe House Veiled In Brick by LIJO.RENY.architectsThe House Veiled In Brick by LIJO.RENY.architects Random Jobs Submit your jobAll jobs »Jobs Post positions» Sort by districtsAll|Northern China|Middle China|Southern China