来自 University of Stuttgart 对gooood的分享 。更多关于他们,请至:University of Stuttgart on gooood。
Appreciation towards University of Stuttgart for providing the following description:
在无生命的自然环境中,颗粒状的物质在侵蚀和沉积的循环作用下不断再生。那么,是否可以将这一现象运用到建筑当中,使建筑结构也可以不断地被重新配置呢?
In inanimate nature, large masses of granular substances, such as sand or gravel, are in constant processes of formation through perpetual cycles of erosion and accretion. What if architecture was to emulate this behaviour and allow for its own continuous reconfiguration?

由斯图加特大学计算设计学院(ICD)设计的聚合展馆(Aggregate Pavilion 2018)展示了他们在颗粒材料方面的为期10年的研究成果。这是首个完全由数字设计的颗粒材料围合而成的建筑空间,这些颗粒并未真正地连接,而是在摩擦力的作用下实现接触,兼顾了固体材料的稳定性和流体的可重构性,从而为“去稳定”(de-stabilization)和“重新稳定”(re-stabilization)的建造形式开辟了新的视角。
The ICD Aggregate Pavilion 2018 presents the latest results of 10 years of research into designed granular materials for architecture. It constitutes the first fully enclosed architectural space entirely constructed from designed granules, which lie only in loose frictional contact. Such unbound granular materials show the unique property to obtain both the stable character of a solid material and the rapid reconfigurability of a fluid. If custom-designed particles are deployed, granular materials can form self-supporting spatial enclosures while remaining fully reconfigurable and reusable.
▼展馆外观,exterior view


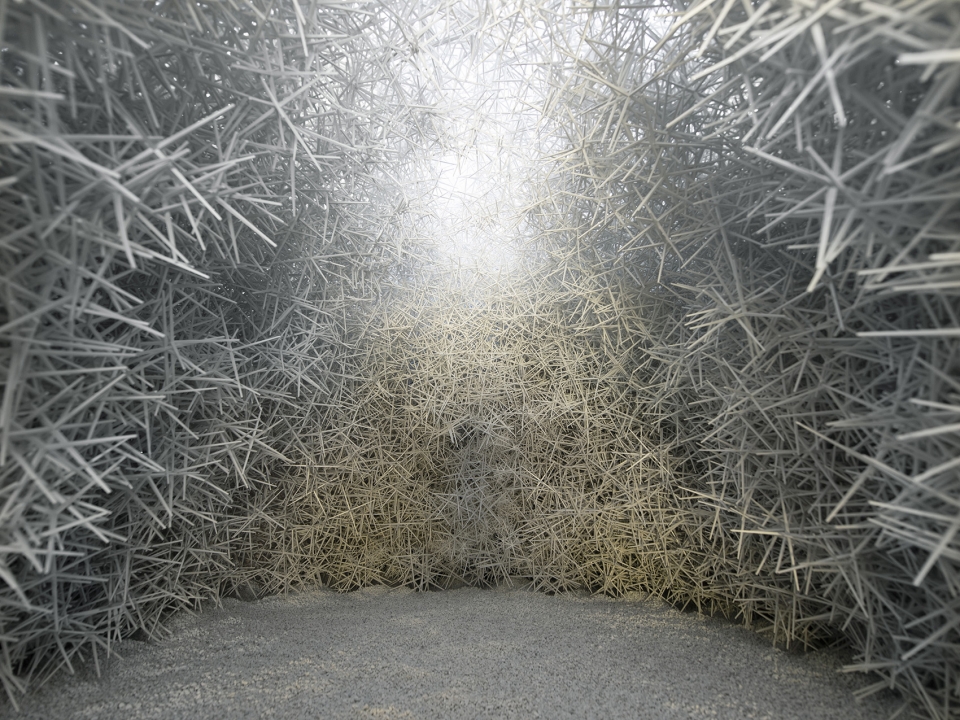
▼内部视角,interior view

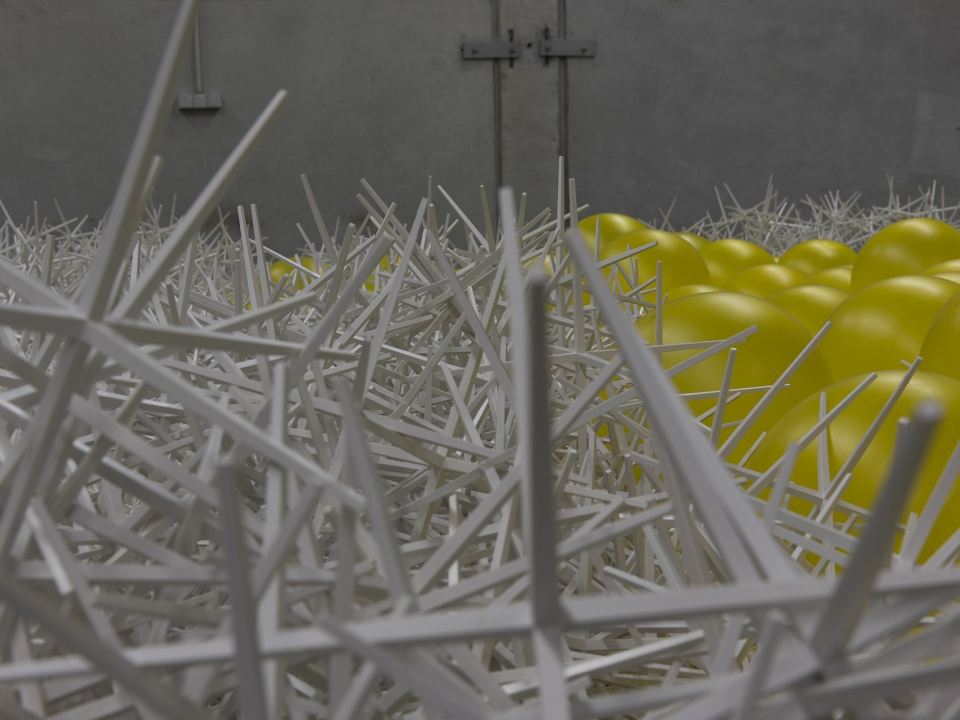
▼这些颗粒并未真正地连接,而是在摩擦力的作用下实现接触,these particles are not bound to each other: they interact only through contact forces


构成装置的7万颗星星状的白色“颗粒”由再生塑料制成,并通过大型的机器人系统倾倒在现场。每个颗粒的形状和材质皆可以由设计者自行定义。展馆中采用了两种不同的“设计颗粒”:一种是可以浮动的球体,一种是可以互锁的六足结构。前者可被视为一种可移动的框架,后者则是一种自我支撑的空间结构。由于相互不存在连接关系,这两种“颗粒”均可以在新的构造中被重新利用。由颗粒组成的全尺寸结构完全是在现场制作。
70.000 star-like, white particles are made from recycled plastics. They are poured by a rapidly deployable, large scale robot system. The pavilion demonstrates how designed granular materials open up a new perspective for a design paradigm of productive forms of de- and re-stabilization and, thus, an architecture that can be rapidly deployed and reconfigured, as well as eventually removed and reused. The ICD Aggregate Pavilion 2018 explores the construction of spatial enclosures made from designed granular materials. Granular materials are material systems which consist of large numbers of granules or particles. These particles are not bound to each other: they interact only through contact forces. In nature examples are sand, gravel or snow. In a designed granular material the particles are artificially made and consequently their geometry and material can be defined by the designer. Designing the particle allows the calibration of the characteristics of the overall granular material.
▼两种不同的“设计颗粒”:浮动的球体,和互锁的六足结构,two types of designed particles: convex spheres, which can flow, and highly non-convex hexapods and dekapods, which can interlock


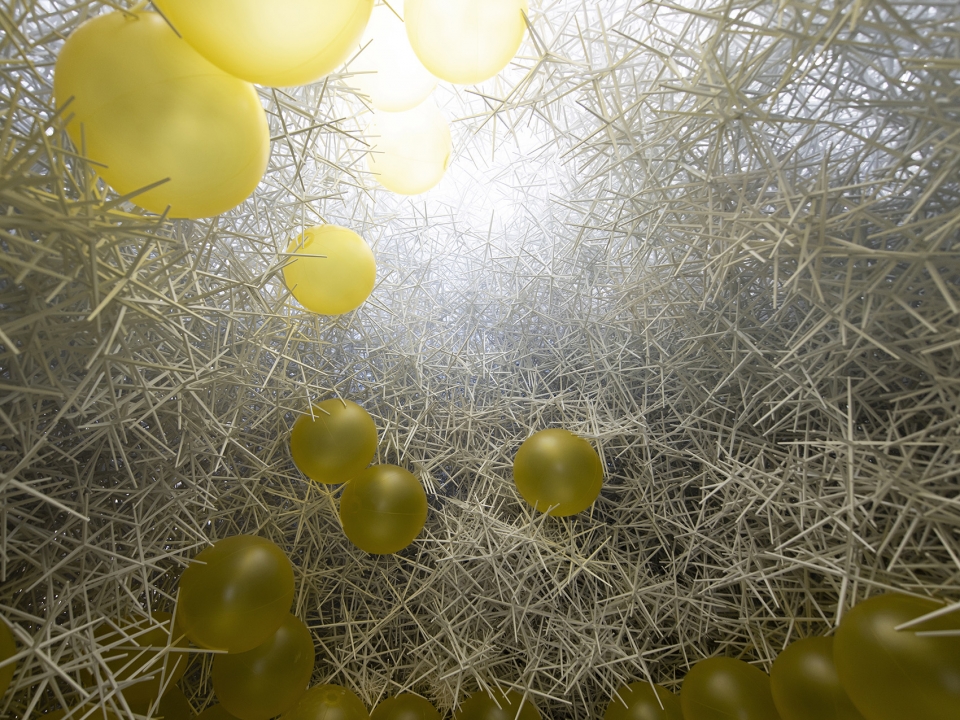


The ICD Aggregate Pavilion 2018 uses two types of designed particles with different behaviours: convex spheres, which can flow, and highly non-convex hexapods and dekapods, which can interlock. The convex spheres are a removable formwork, the highly non-convex hexapods and dekapods remain as a self-supporting spatial structure. Both types can be re-used in a new formation as the particles are not bound to each other. Thus, particles deployed in preceding projects have been entirely re-used for the ICD Aggregate Pavilion 2018. The highly non-convex hexapods are industrially custom-made in an injection-moulding process using recycled plastics. The convex spheres are ready-made inflatables. Using a very large number of them they turn into a bulk material. Being inflatables, they have the added benefit of a low packing volume and a high deployable volume. Like the highly non-convex hexapods and dekapods, they are entirely reusable for the next project iterations.
▼生成过程,颗粒通过大型的机器人系统倾倒在现场,a cable-driven parallel robot, custom-made to be flexibly installed, was fixed on four points to the walls of the hall and its supporting beam structure
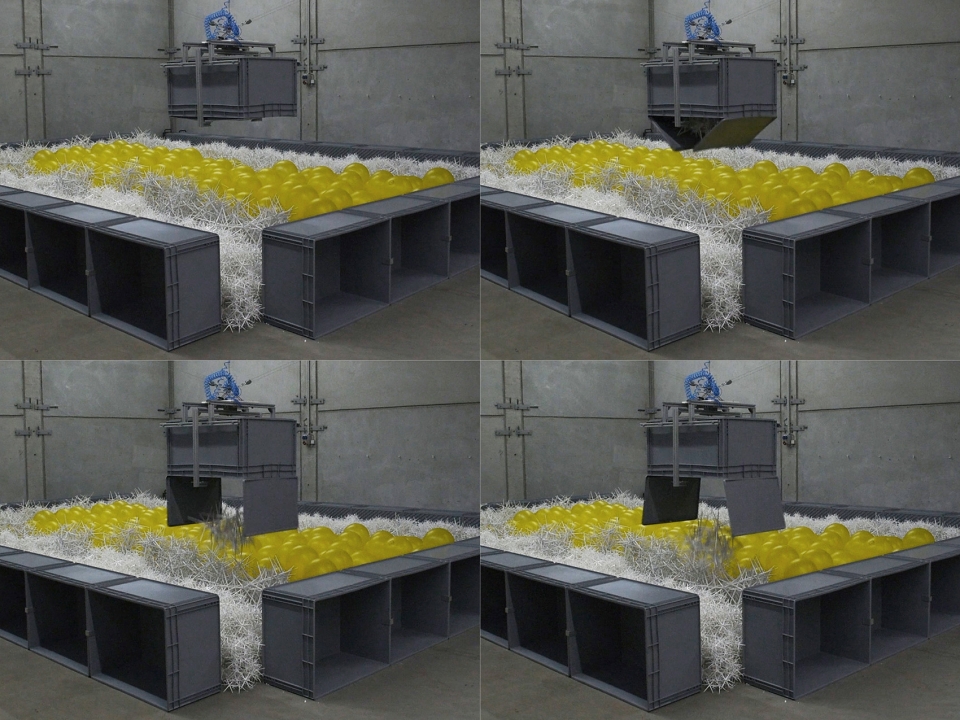

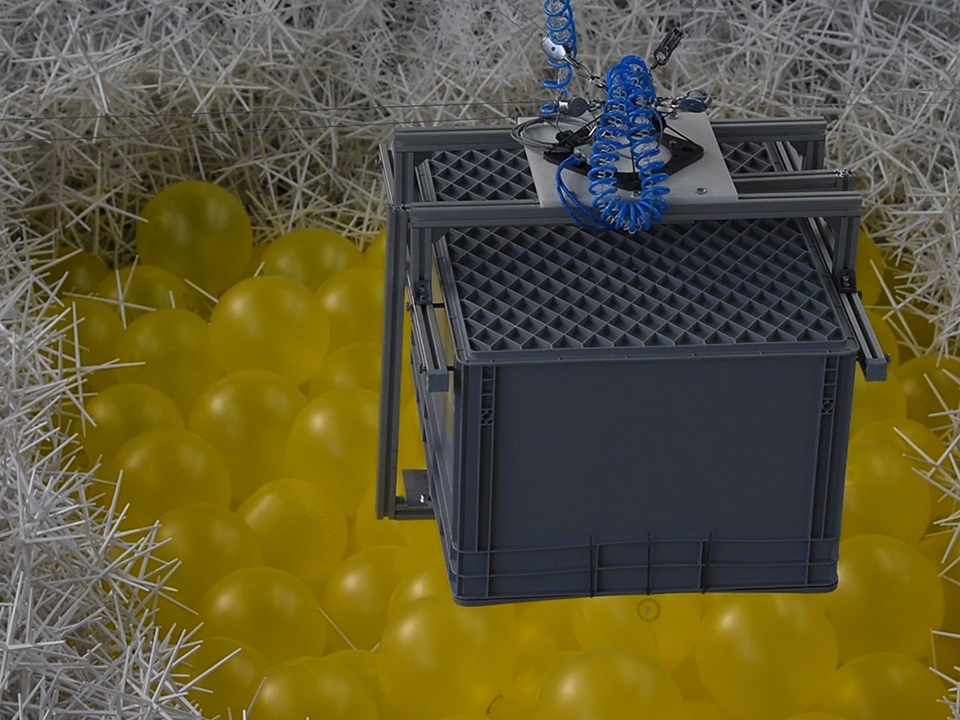


Full-scale structures made from designed granular materials need to be constructed jn situ. In this case the industrial storage space of the granular materials has been converted into a production hall. A cable-driven parallel robot, custom-made to be flexibly installed, was fixed on four points to the walls of the hall and its supporting beam structure. The total working space measures approximately 9 by 10 metres. The storage boxes of the granular material are used as an effector on the cable-driven parallel robot, which drives them to a precisely defined deposition point and unloads them. Consequently, the empty boxes are deposited as a boundary container on the edges of the structure. In this manner also the storage-, production- and container-system are never redundant but fully reusable.The cable-driven parallel robot was controlled through a custom-written interface using a parametric modelling environment. The design and construction process involved an image-segregation algorithm, which allows to check the geometric accuracy of the structure using image segregation. The design of two interconnected vaults explores the potential of spatial enclosures, formed entirely of designed granular materials at an architectural scale.
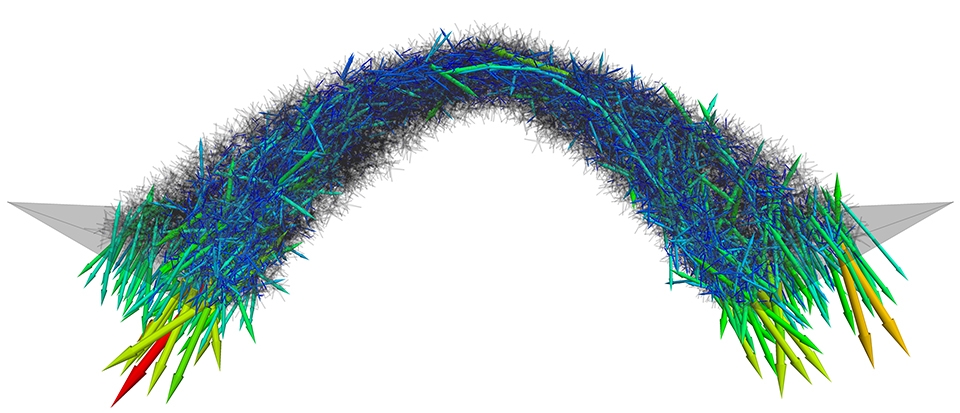
▼数字模型,model
Vimeo视频地址:https://player.vimeo.com/video/290457268?app_id=122963
PROJECT INFORMATION
Address: 70469 Stuttgart, Germany
Installed: Summer 2018
Size: circa 105 cubic metres (Height: 3.00 metres, Width: 5.00 metres, Length: 7.00 metres)
Weight: circa 2500 kilograms
Number of particles: circa 120 000 non-convex particles (circa 70 000 hexapods and circa 50 000 dekapods) and circa 725 convex particles (spheres)
ICD Institute for Computational Design and Construction
Karola Dierichs, Achim Menges
Research Assistants
Christian Arias, Bahar Al Bahar, Elaine Bonavia, Federico Forestiero, Pedro Giachini, Shir Katz, Alexandre Mballa-Ekobena, Leyla Yunis, Jacob Zindroski
Cable Robotics
Ondrej Kyjanek, Martin Loucka
Manufacturing
Wilhelm Weber GmbH & Co. KG
Funding
GETTYLAB
ITASCA Consulting Inc.
More:University of Stuttgart 。更多关于他们,请至:University of Stuttgart on gooood









这里面如果不小心摔了一跤,会不会变成奶酪
尖锐的力量与科技的结合碰撞出前瞻的眼光,好棒!
内部空间十分科幻
??????????
看的贼爽!
密恐福利
尖锐恐惧症,密集恐惧症。