海外存知己,天涯若比邻。
在海外专辑分享海外华人的故事。希望这份分享可以让世界更加海阔天空。
第七十八期为您呈现的是毕业于普林斯顿大学、现就职于KVA MATx的史纪。
A bosom friend afar brings distant land near. The Oversea album shares the lives of Chinese living abroad with all. The No.78 episode is about Ji Shi who graduated from Princeton University and is now working for KVA MATx.
为什么出国?
Why going abroad?
主要是随大流。
Primarily to follow what everyone else was doing.
在国外遇到了什么让你印象最深刻的事情?
What impressed you the most when you are abroad?
Axel Kilian半夜两点发的答疑邮件,Ryan Johns写的和我原文差不多长的研究建议,同学帮我一起逐字逐句地修改校对文章,等等——师友们在学术上给我的帮助太多了,在学校的时候不觉得,现在看来弥足珍贵。
Axel Kilian sending me an email at 2:00 am to answer questions, Ryan Johns writing comments which is as long as my proposal and contains incredible details, my colleagues helping proofreading my article line by line, etc. My professors and friends have provided me tremendous help to my academic work, and I missed this a lot.
最想念祖国的什么?
What do you miss the most about China?
炒肝和爆肚。
Chao Gan & Bao Du.
你会回国吗?为什么?
Will you come back China? Why?
未来会的吧。但是近期不会,先试试,先熟悉一下西方那一套。
In the future, yes. But not now. I would like to try things out here, also to familiarize myself with what people are doing here.
出国后在不同的背景下再看中国是否看得更清晰,有哪些感触?
Is it more distinct to view China in a different environment after going abroad? Any thought?
更不清晰了。看中国的话,虽然我出国没有多久,但是国内近几年涌现的新概念好多我已经跟不上了;看建筑学的话,更不敢说看得清晰。相反,我感觉似乎一直是国内看国外看得更清晰,国内好像已经很熟悉西方那一套了。这一点我就不予置评了。
The opposite. In general, although it hasn’t been long since I left, it seems there are quite a lot new concepts in China that I don’t know already; Specifically speaking about the architecture, I feel like I’m more confused. On the contrary, I feel like people in China seem to have a better view of the discipline, it seems they are very aware of what’s going on in the west. I don’t really want to comment on this.
你的学校有哪些教育特点?
What makes the curriculum of your school different from other architecture schools?
我一直认为普林的特点往往取决于学生的特点,每个人都是很不一样的,并且每个人都让我学到很多(起码在我在的时候是这样的)。所以我很难全局地评价,但对我自己来说,普林帮我初步建立了数字实践的价值观,同时包容了我自由散漫的性格。
I always think what Princeton is like largely depends on what the students are like. Every students is different , and I leant a lot from my colleagues (at least this was how it worked when I was there). So it hard to give a general comment on this. But to me, the experience in Princeton helped me established a position in digital architecture practice, also the school holds a tolerant attitude towards students like me being free and disorganized.
你现在工作公司的特色和有趣的地方?
What are the characteristics and interesting points of your firm?
我们公司有一个屋顶平台,平时大家在那上边吹风儿,吃午饭,喝酒,侃大山,特别厉害。
We have a roof deck in our office. It’s a fantastic place for people to chill, have lunch, drink and chat – it’s really awesome.
最喜欢的艺术家(绘画音乐电影等广泛范围)是谁?给你创作带来了什么影响?
Who is your favorite artist (in wider range such as art, music, movie)? What is the influence?
我其实不是很懂艺术。近期合作过的艺术家里,李维伊和陈抱阳的作品给了我挺多启发的。
I don’t know much about art. But among artists whom I’ve worked with recently, the work of Weiyi Li and Baoyang Chen inspired me a lot.
觉得自己的作品集有哪些迷人的特质?
What fascinates viewers the most in your portfolio in your opinion?
我的作品不太迷人,反而比较迷糊,有的时候我也不是很清楚在做什么;也比较过时,我近些年一直做的具身化计算设计与早前的控制论乍看十分相似。现在做大数据,机器学习,增强现实这种的多,我做的东西主要围绕建筑机器人展开,比较关注实体,相比之下不太入流。
My work confuses readers rather than fascinates them – I sometimes have difficulties interpreting my work too; My work is also a bit outdated – I’ve been focusing on Embodied Computation for recent years, which in many ways resembles cybernetics. The current fashion pays more attention to data, machine learning, AR, etc., and my work revolves around architectural robotics which cares physicality a lot. Thus, I can barely position my work in the current picture of practice.
能具体说说你所讲的建筑机器人指什么吗?
Can you elaborate on the concept of architectural robotics in your practice?
我所讲的建筑机器人中“机器人”概念既不是指拟人化机器人,也不是指利用工业机器人建造的自动化过程。这里的机器人概念核心在于一个自主的议程,既建筑应该像其他日常物体一样具有针对人类行为的自主反馈,因为建筑与人的交互情形不比其他任何东西少。因此,建筑机器人可以是包含了新的社会情景的人与建筑的共栖;可以是一个充满传感与反馈的数据型空间;可以是一个针对编码与算法的物质化身;可以是一个应用(或误用)机器人思维和方法创作空间的过程,等等。
The concept of Architectural Robotics here is neither about the anthropomorphic robot nor the automation in fabrication. The core concept of architectural robot focuses on an autonomous agenda – architecture should be as human-autonomous as other everyday objects are since architecture contains as many human-interactions as everything else does. Thus, architectural robots can be understood as an human-robot cohabitation with new social and spatial scenarios, a data-heavy space with sensory inputs and feedbacks, a spatial and material embodiment of codes and algorithms, the use (or mis-use) of robotic thinking and methodologies in space-making process, etc.
什么时候开始看谷德网的?欢迎你提出建议哦,谢谢。
When did you start to follow gooood? Any suggestions?
我大二的时候第一次听说谷德网。希望你们越办越好。
I knew gooood in my sophomore year. All the best for your future endeavours.
W O R K
01.
机器6号,柔性:平衡和晃动
Robot No. 6, Soft: Balancing and Wiggling
2017至今,进行中
毕业论文指导:Mónica Ponce de León
研究课题指导:Axel Kilian, Forrest Meggers
2017-present, ongoing
Thesis Adviser: Mónica Ponce de León
Research seminar Adviser: Axel Kilian, Forrest Meggers
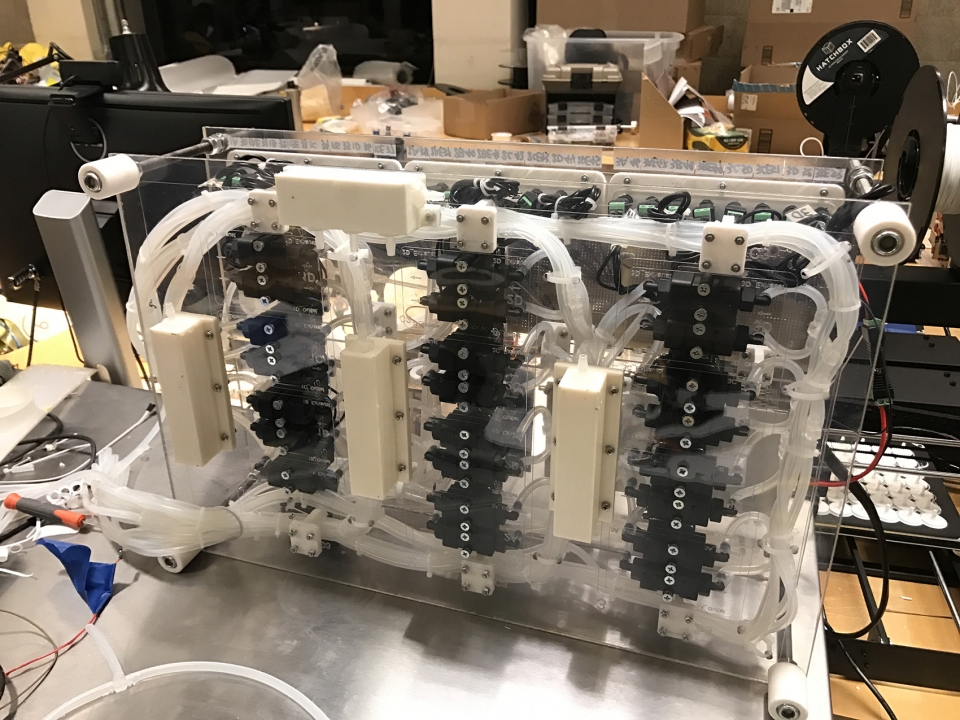
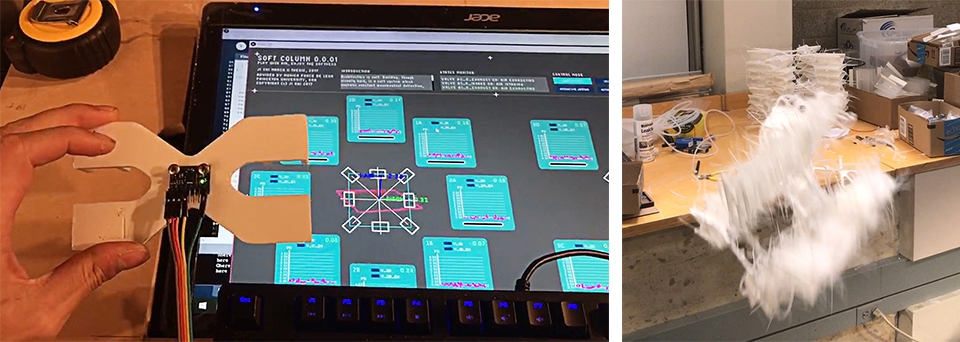
▼机器正视图,风箱状排列的气袋与单位打印连接件交叉组合,Front view of the robot, bellow-shape air bags sandwiched by 3D printed joints

柔性:平衡和晃动是我2017年普林斯顿毕业设计。它是一个气动建筑机器人,其主要组成部分包括聚氨酯气袋和三维打印连接件(同时也包括一些管子、气阀、接头、阀箱、转换口、连接口、电路、电路板、连接线,等等乱七八糟的东西)-这些部分被一个土法炮制的充放气算法程序控制。该机器的核心功能是通过加压气袋,使得整体结构可以称重。同时,传感和反馈算法保证结构的稳定性(不向一侧倾倒),这一机制得益于对不同位置气袋的分别控制。这一机器可以用于一些真实场景,比如气动机制快速部署的特性可以满足应急避难所关键部分的要求;又比如其安全、可交互的特性可以用于建筑最外层的界面。
▼机器细部,硅胶软管穿插于聚氨酯气袋之中,Close-up of the robot, silicone rubber tubing between polyurethane air bags

▼机器细部,机器基座部分的管子与气阀箱,Close-up of the robot, tubing and air manifolds at base

▼机器细部,三维打印的底板被螺栓固定于基座,Close-up of the robot, 3D printed bottom plate bolted to base

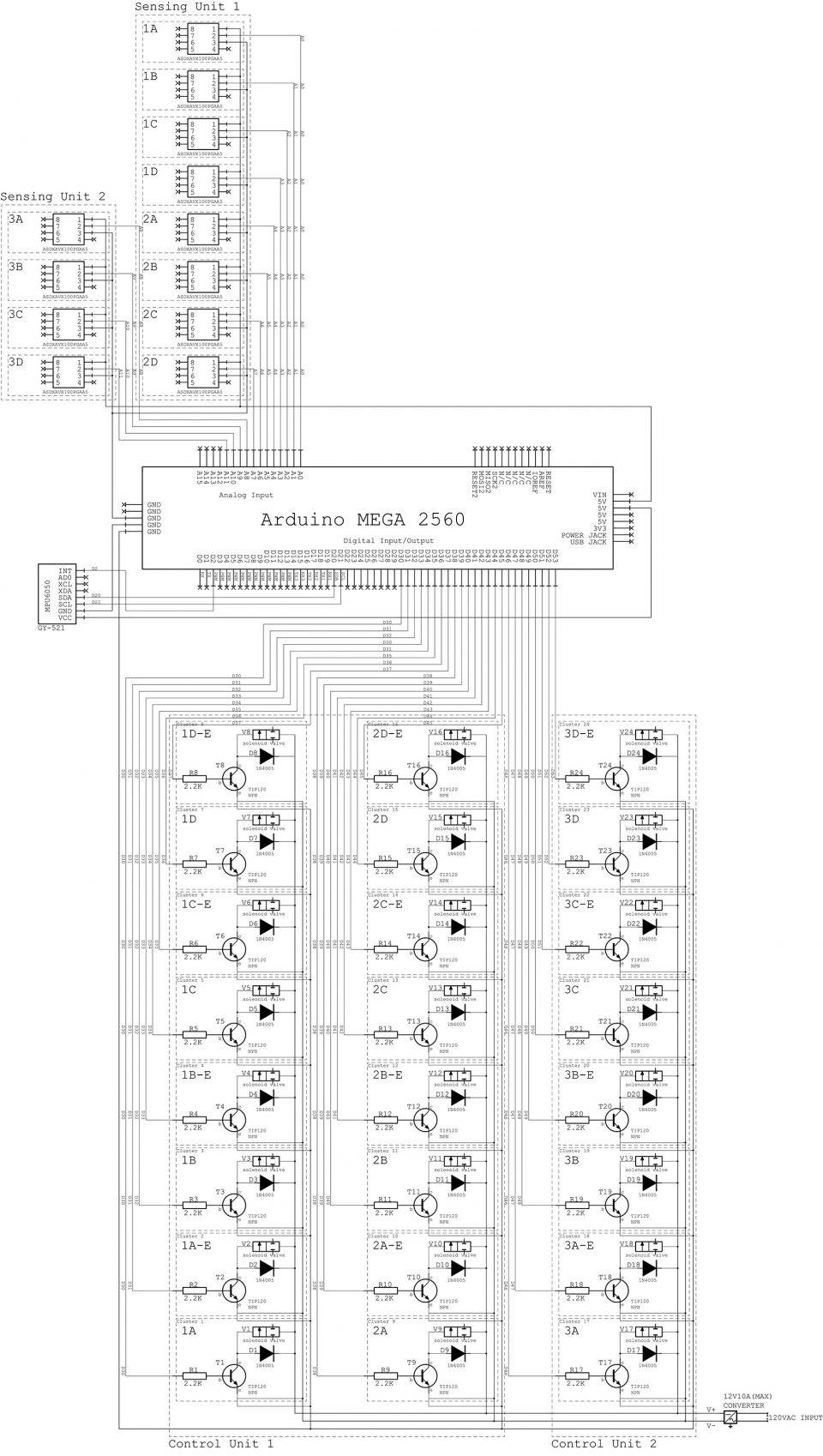
▼电路图解,电磁阀与压力传感器组成的控制系统,Circuits diagram, control system of solenoid valves and pressure sensors
▼间隔拍摄,工作中的系统,Timelapse, system in operation, robot being manipulated in three dimension

Soft: Balancing and Wiggling is my thesis at Princeton SoA at 2017. It is a pneumatic architectural robot with polyurethane air bags and 3D printed joints (plus a set of pipes, valves, hoses, manifolds, adapters, connectors, circuits, boards, wires, etc.) controlled by homemade inflate-and-balance algorithms. The core function is to use pressurized air bags to lift weight; and the sensing-feedback algorithm prevents the whole thing from falling by separately controlling the pressure in different air bags. This prototype can be applied to several real life situations. It can work as key components for an emergency shelter – lightweight and fast deploying; or an additional interface between human and buildings – safe and responsive.
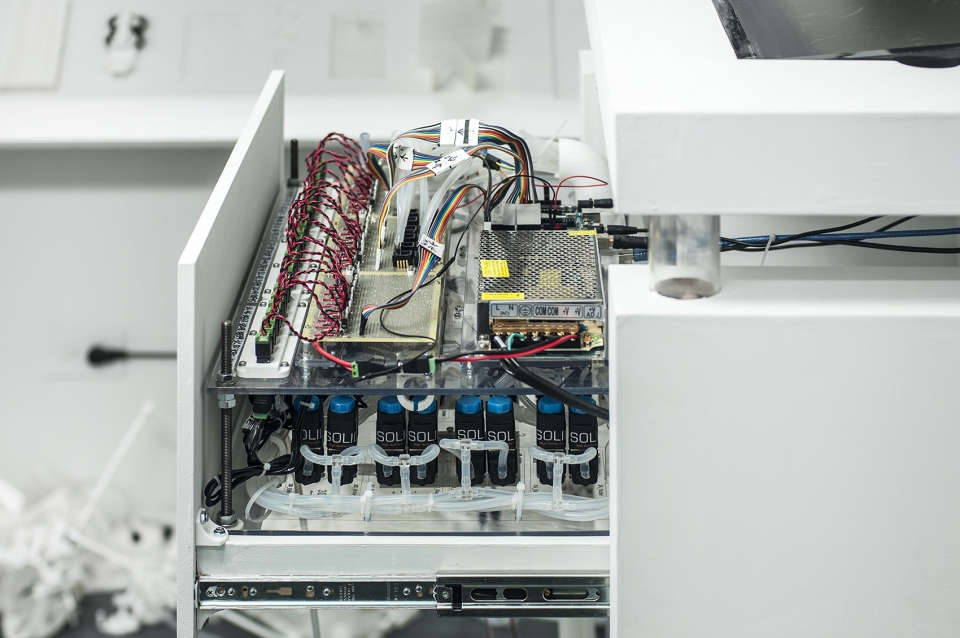
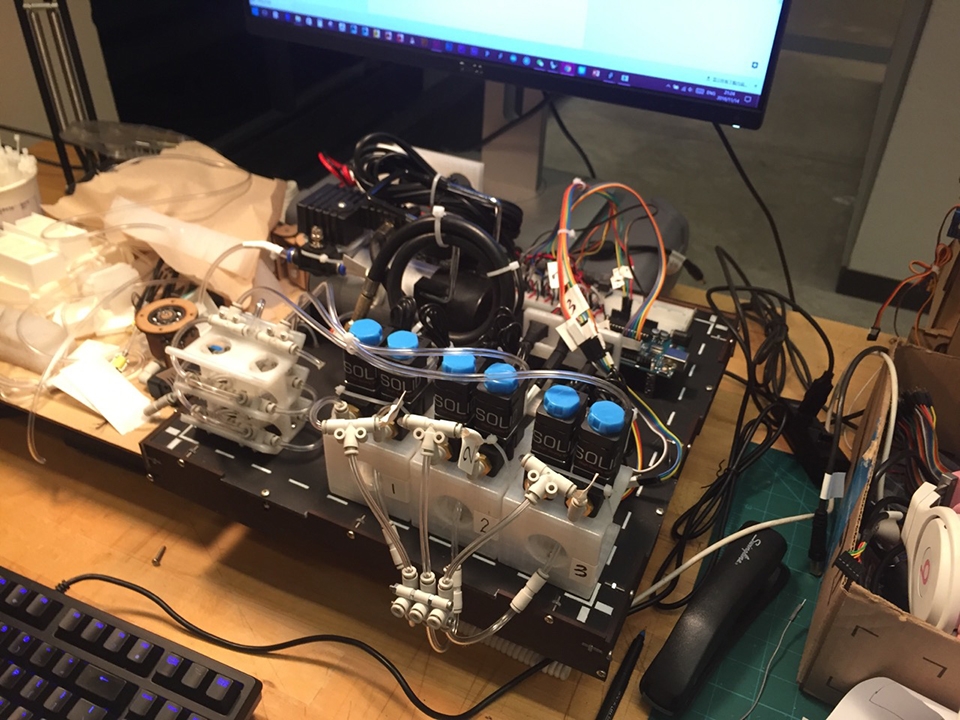
▼控制台,整合了电路、显示屏、导气管和气泵的装置,Control station, integrated with circuits, display, tubing and air supply.

▼控制台顶视图,该装置使得设计者可以方便简易地操作,Top view of control station, setup providing handy operation for designers

▼电路细部,土法炮制地电路整合了Arduino控制器,印制电路板,跳线,电磁气阀、电源,等等,Close-up of circuits, integration of Arduino controllers, PCB boards, jumper wires, solenoids, power, etc.
▼照片,毕业设计展出于纽约市 Parasol Projects Gallery Space @ Bowery,Photograph, thesis project on view at Parasol Projects Gallery Space @ Bowery, NYC


02.
展览3号,#标签-上海
Exhibition No. 3, #Hashtag-Shanghai
2017,建成
联合策展人:吴有,冯立星
参展艺术家:蔡承良、陈抱阳、冯菲菲(澳大利亚)、雷荣华、李宛、李维伊、刘诗园、王骁楠、王韫琛、王子耕、吴逸飞、张微伟
上海当代艺术博物馆 2017.11.25-2018.03.09
2017, built
Co-curator: You Wu, Ivy Feng
Exhibitors: Baoyang Chen, Weiyi Li, Shiyuan Liu, Weiwei Zhang, Wan Li, Zigeng Wang, Yifei Wu, Xiaonan Wang, Caison Wang, Feifei Feng, Chengliang Cai, Ronghua Lei
Power Station of Art, Shanghai
▼展厅入口透视,展览#标签于上海当代艺术博物馆展出,View from gallery entry, exhibition #Hashtag on view at Power Station of Art, Shanghai

“#标签”展览制造了一个虚拟社交网络的物理空间。社交媒体上广泛使用的“#”不仅是一个用于信息分类的标记,更衍生出数字世界与现实世界的互动。本次展览正是基于这种互动关系,重新思考艺术实践中美术馆和艺术家的身份,并邀请参与者随时打破既定身份。
The #hashtag exhibition marks a physical location for digital social space. Used extensively in social media, “#” works not only as labels of categorized information, but also as embodiment of interactions between the digital and the real. This binary of “#” has inspired the exhibition to reconfigure the roles of art museums, artists, and visitors, by inviting all parties to step out of their long-established identities.
▼试验(左),用户输入的作品评论被一台位于现场的热敏打印机实时打印;互动(右),参观者在现场扫描作品展墙的二维码后在手机客户端输入评论,并讲评论现场打印留档,(left) Experiment, user-generated comments being printed out in real-time by an on-site thermal printer;(right) Interaction, visitor printing out her comments after scanning the QR codes on the exhibition walls


▼轴测图,展览设计,由艺术品、展墙、小凳子、屏幕、电线、以及其他现成工艺制品构成的场域,Isometric, exhibition design, field of artworks, walls, stools, screens, wires, ready-made objects, etc.

展览将经由“#线上”和“#现场”平行展开:“#线上”将展厅转化为实时更新和存储的云空间,艺术家首先通过“#”关键词定义自己的作品,同时观众通过扫码为每件作品添加新的“#”定义;“#现场”则是云空间的物理地址,是激发互动行为的物理界面。
#hashtag takes place in two parallel dimensions – “# online” and “# on-site”. “#online” transforms the exhibition into real-time updating cloud storage – both artists and visitors contribute to its archive by sending hashtags to specific artworks. “#on-site”, on the other hand, becomes a physical address linking to the cloud, and a tangible screen displaying all social interactions.
▼中央框架正视图,这一现实中的物理框架实体象征了数字世界中的信息收纳结构,Front view of central frame, a physical frame in real life as metaphor of information framing in digital world

▼展厅中部透视,不同尺度的物体构成了一个三维场域,View from center of the gallery, a 3D field of objects in multiple scale

▼施工,施工人员组装中央框架,Construction, central frame being installed

▼试验,开展前艺术家和策展人在现场尝试不同布局,Experiment, artists and curators testing the layout on site

这里,不再有展厅,只有现场;不再有展墙,只有岛屿;不再有装置,只有界面;不再有画布,只有分辨率;不再有顺序,只有超链接;不再有列表,只有数据结构;不再有展签,只有二维码;不再有描述文字,只有定义建构;不再有观众,只有参与者;不再有观察,只有介入;不再有留言薄,只有弹幕墙;不再有预期,只有统计;不再有评论,只有标签。不再有关于数字的推测,只有基于数字方法的记录;不再有虚拟的现实,只有真实的虚拟。
Thus, no more galleries, only lives; no more sections, only archipelagos; no more installation, only interface; no more canvas, only resolution; no more sequence, only URL; no more catalogue, only data structure; no more labels, only QR codes; no more descriptive texts, only definitive constructs; no more visitors, only players; no more observation, only intervention; no more guestbook, only bullet screen; no more anticipation, only statistics; no more comments, only hashtags. No more speculation on the digital, only digital documentation; no more virtual reality, only real virtuality.
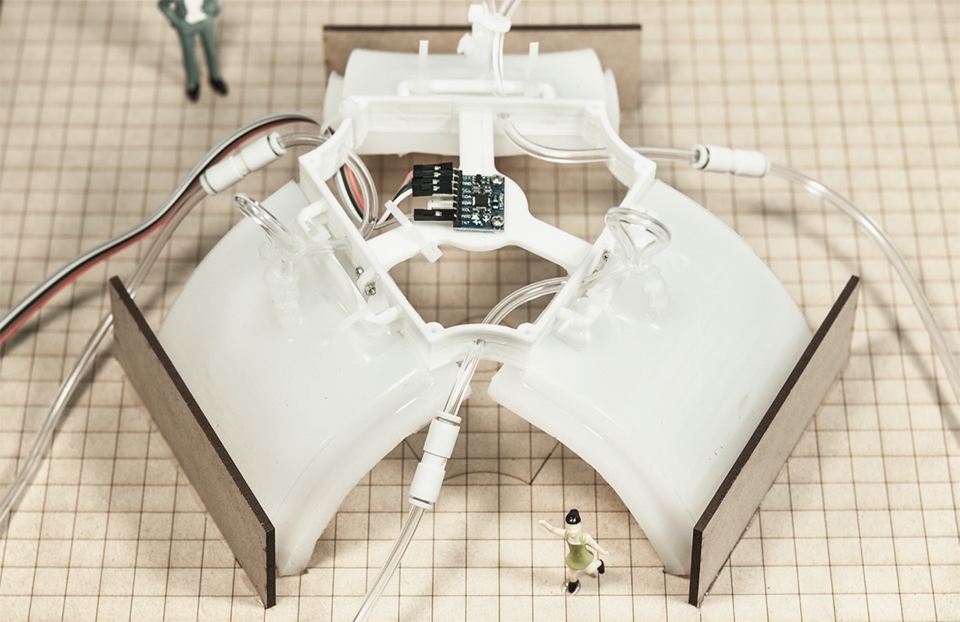
▼开幕式,策展人展示位于现场的全局微缩模型,Opening, curators demonstrating the miniature model

▼互动,参观者与全局微缩模型互动,Interaction, visitors interacting with the miniature model

03.
机器4号,自主社区
Robot No. 4, Autonomous Community
2016,完成
方案指导:Axel Kilian
2016, completed
Project Adviser: Axel Kilian
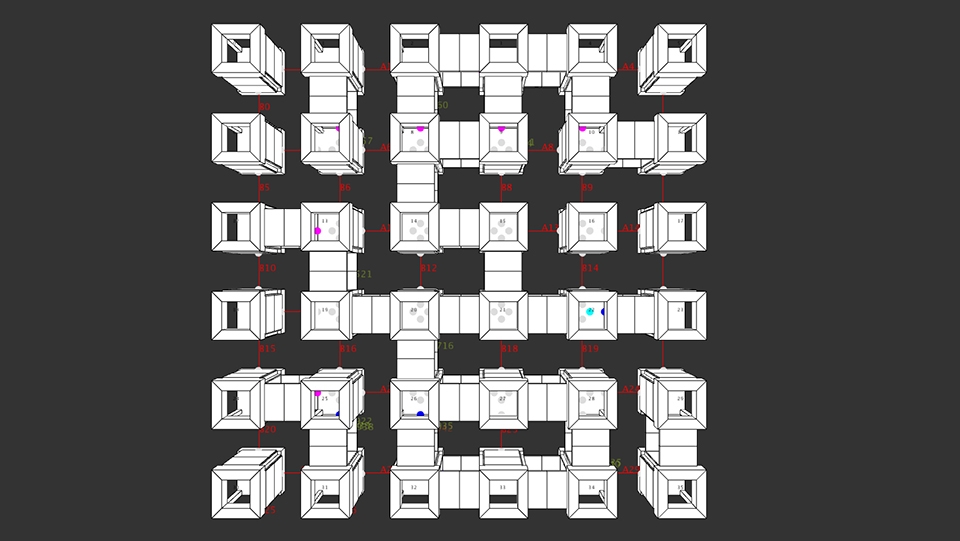
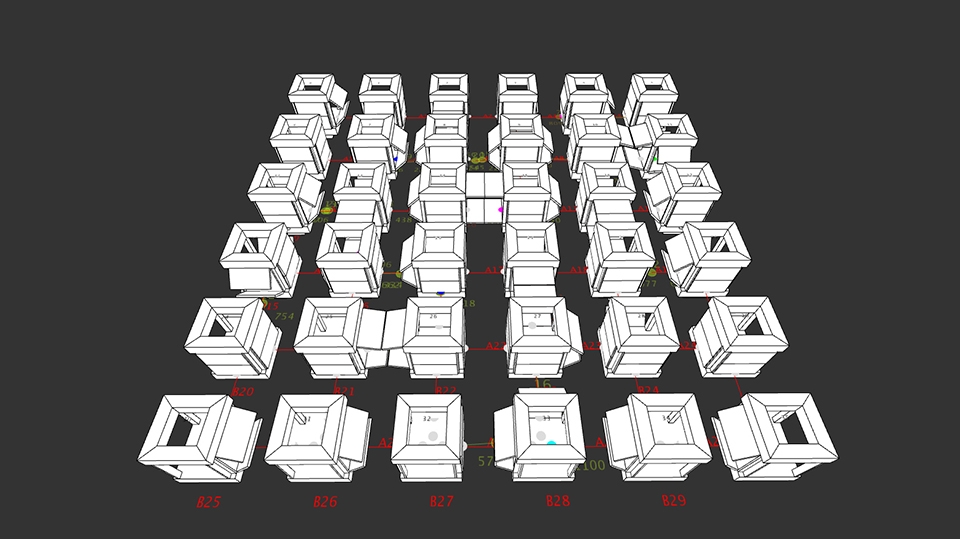
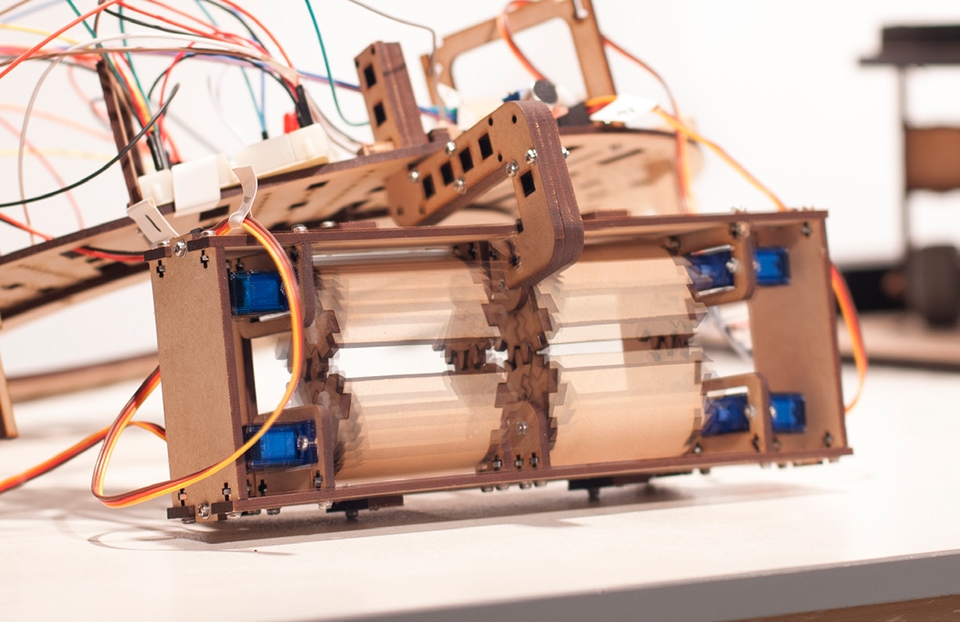
▼评图照片,现场演示自主社区的空间模式,该系统由一个单机的Processing程序算法控制,Studio review, demo of Autonomous Community in review, system controlled by a stand-alone processing program

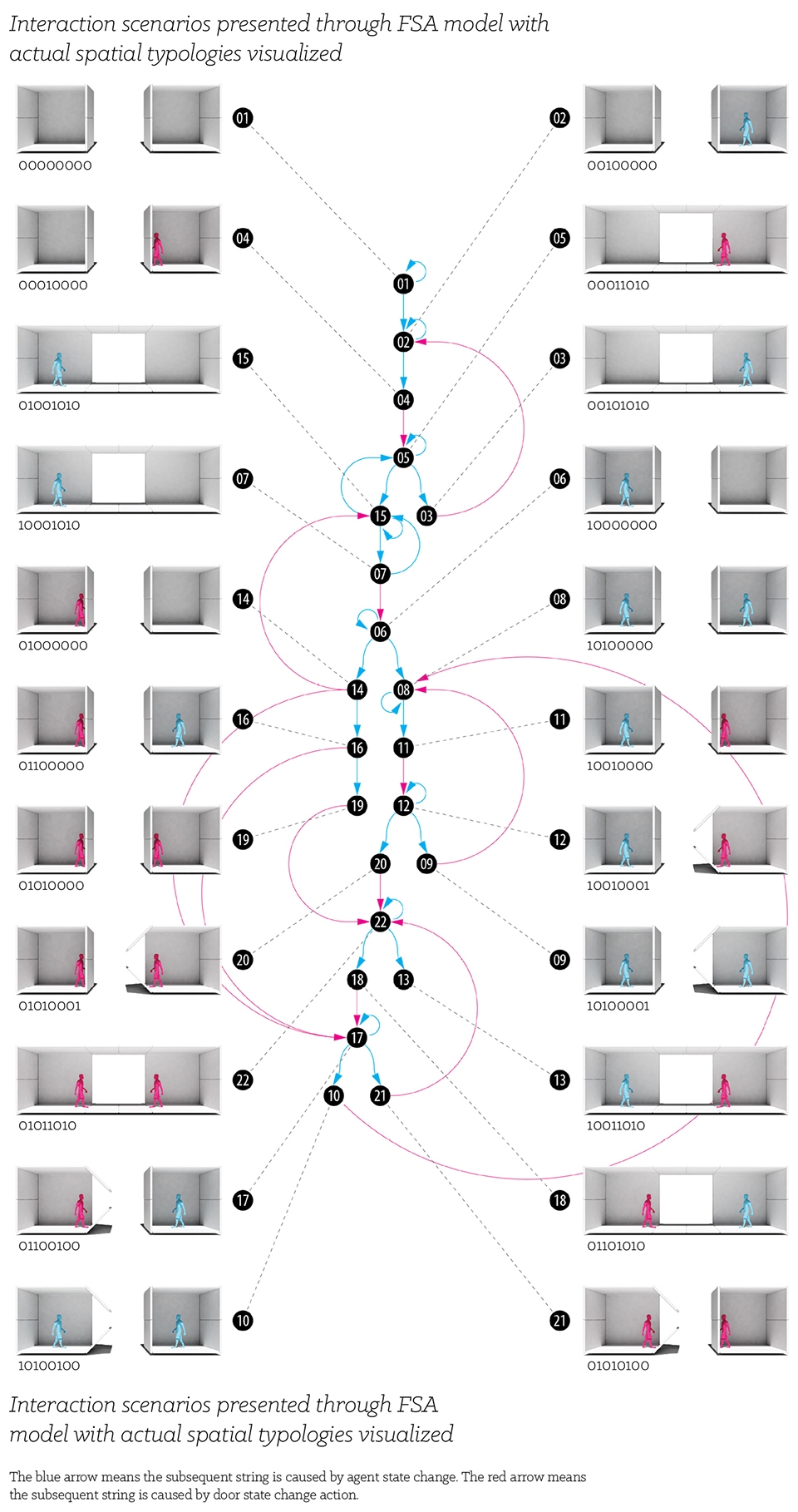
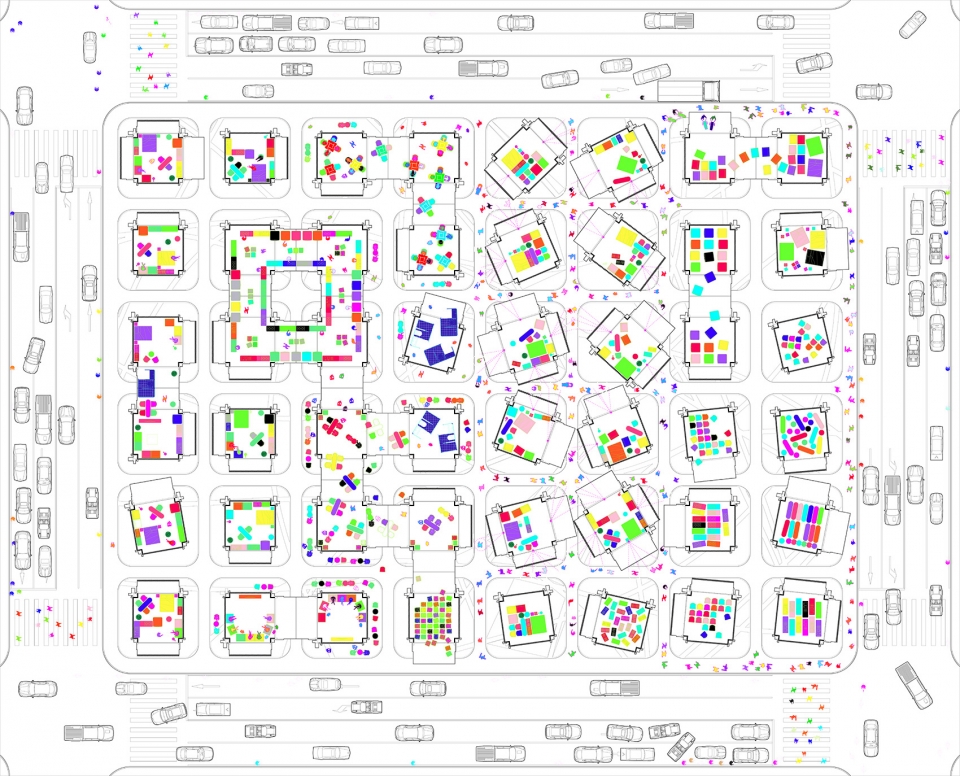
这一方案是一个建筑机器人,其呈现了一个自主化社区的原型。该社区是一个由居住单元组成的无限延展的场域(本案模型中只展现出了4*4的局部),其中的居住单元是经过标准化设计的无差别方盒子。每一个方盒子有四面可开启的界面,同时这些单元被阵列成一个网格。居住单元的可开启界面使得相邻的单元可以被组合成为更大的单元。因此,该空间的全局类型可以不间断的动态变化。这些变化以及相应的空间情景被编译到了一个基于有限状态机模型的程序当中。该程序同时整合了一个基于动源的的模拟算法,其可以触发状态机中的变化。这一套程序驱动一个配备有电路与伺服电机的物理模型,以改变物理模型中空间类型的变化,这一物理模型也是算法的实体化身。这一方案比较典型地代表了我近期具身化计算设计的概念。
▼图解,基于动源的有限状态机互动模型通过数字图表展示,Diagram, agent-based finite state automata (FSA) interaction model shown in chart

▼图解,基于动源的有限状态机互动模型通过建筑空间图解展示,Diagram, agent-based finite state automata (FSA) interaction model shown in visual diagram
▼程序屏幕截图,Screenshot, processing programs
This project is an architectural robot which presents the features in a autonomous community. The non-stop field of housing units (shown as 4×4 field in the model) is on the basis of genetically designed living pods with 4 operable sides sitting next to each other. The operable interface can joint together and create a larger space. As a result, the overall configuration of the field is constantly changing. These configurations and spatial scenarios are coded in a finite state automata (FSA) model. This model was integrated with a agent based plan simulation which triggers the variations in the model. A physical model with electronics and servos were connected to the computer program as embodiment of the design. This project is a typical example of what I’ve been doing as Embodied Computation.
▼物理模型组装细部,物理模型通过伺服电机驱动模型变化以体现空间变化,Close-up of physical prototype assembly, spatial changes embodied in model scale through servo motions

▼概念平面,绘图展示了对于一个完全自主社区的空间场景的想象,Conceptual Plan, illustration of scenarios in a fully developed autonomous community
04.
机器2号,机器控制的化学反应成型工艺
Robot No. 2, Robotic Manipulated Prototyping through Chemical Reactions
合作者:李宛,冯立星
方案指导:Ryan Luke Johns
Collaborator: Wan Li, Ivy Feng
Project Adviser: Ryan Luke Johns
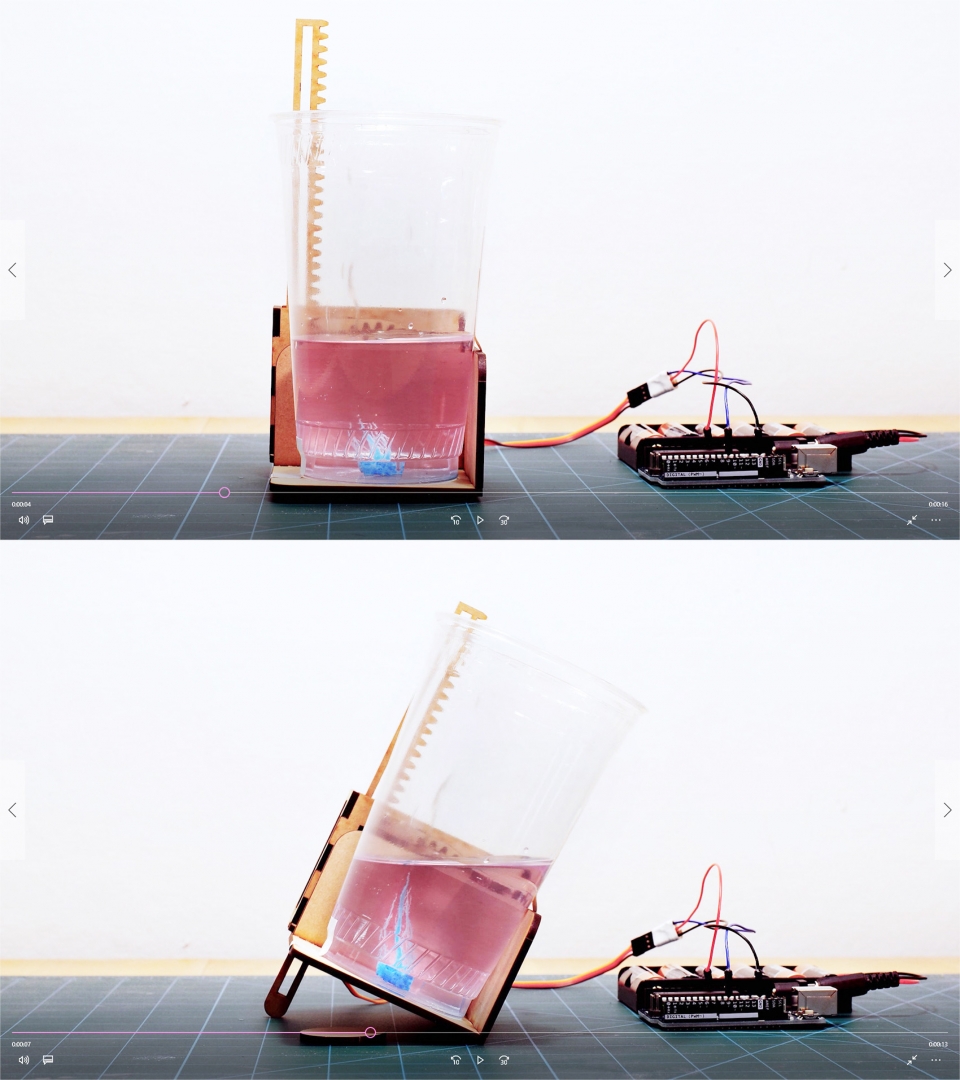
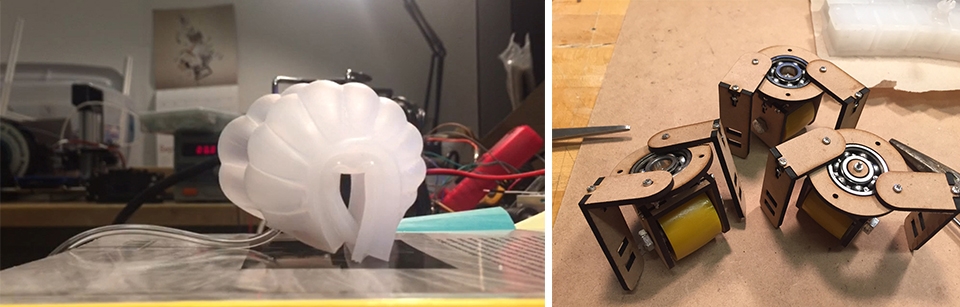
▼细部,金属盐与硅酸钠溶液反应的结晶过程,也被称为化学花园反应,Close-up, reaction of metal salts in sodium silicate, also known as Chemical Garden

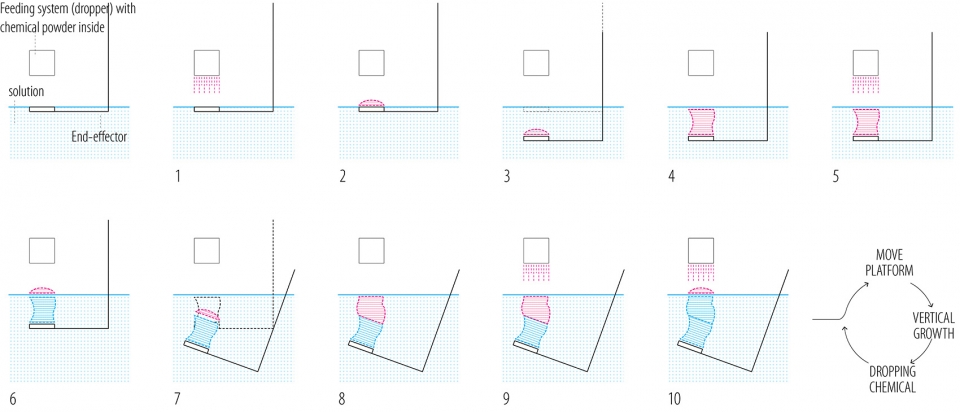
该方案通过控制化学结晶反应中反应容器的空间角度,试图将这一自然的反应过程变为可控的成形工艺。该方案研究了自动化控制领域的反馈概念,希望通过实时反馈算法利用“次优”的零件实现“更优”的结果。这一概念很大程度上启发了该方案的建造工艺,通过引入实时互动和反馈,建造的关注点不再是静态的模型,而是动态的建造过程。
This project looks into manipulating the orientation of a chemical reactor through the crystal growth process, which aims to mitigate the natural process and adapt it into a prototyping process. The project investigated the feedback concept commonly used in automatic control system,which allows us to build “good” things with “bad” parts. This inspires the fabrication process by introducing live feedback and interaction into the filed, and the focus is no longer the frozen model but the dynamic fabrication process.
▼试验,早期对于结晶过程与容器角度关系的测试,Experiment, primitive tests of crystal growth in relation to reactor orientation
▼图解,工作流程以及内在实验的内在逻辑,Diagram, workflow and underlying logic of the experiment
▼轴测,总体实验架构,Isometric, overall experiment setup
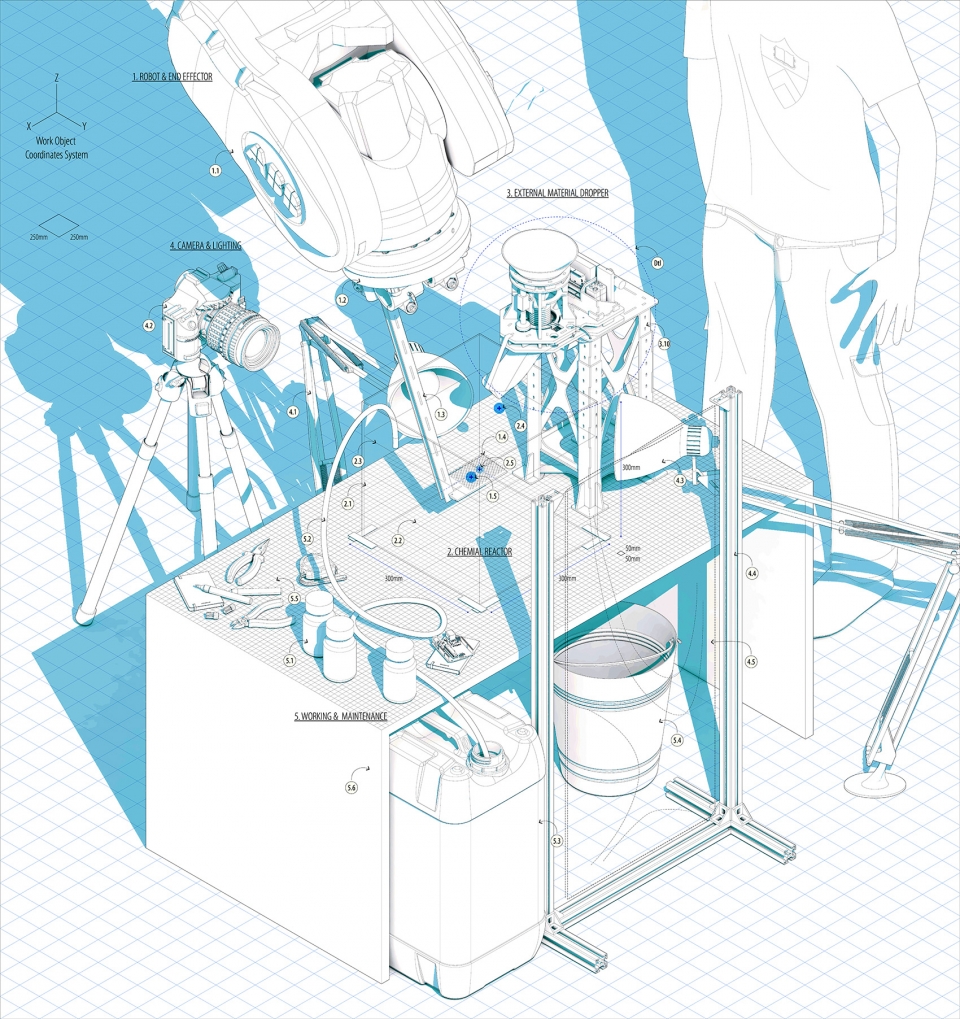
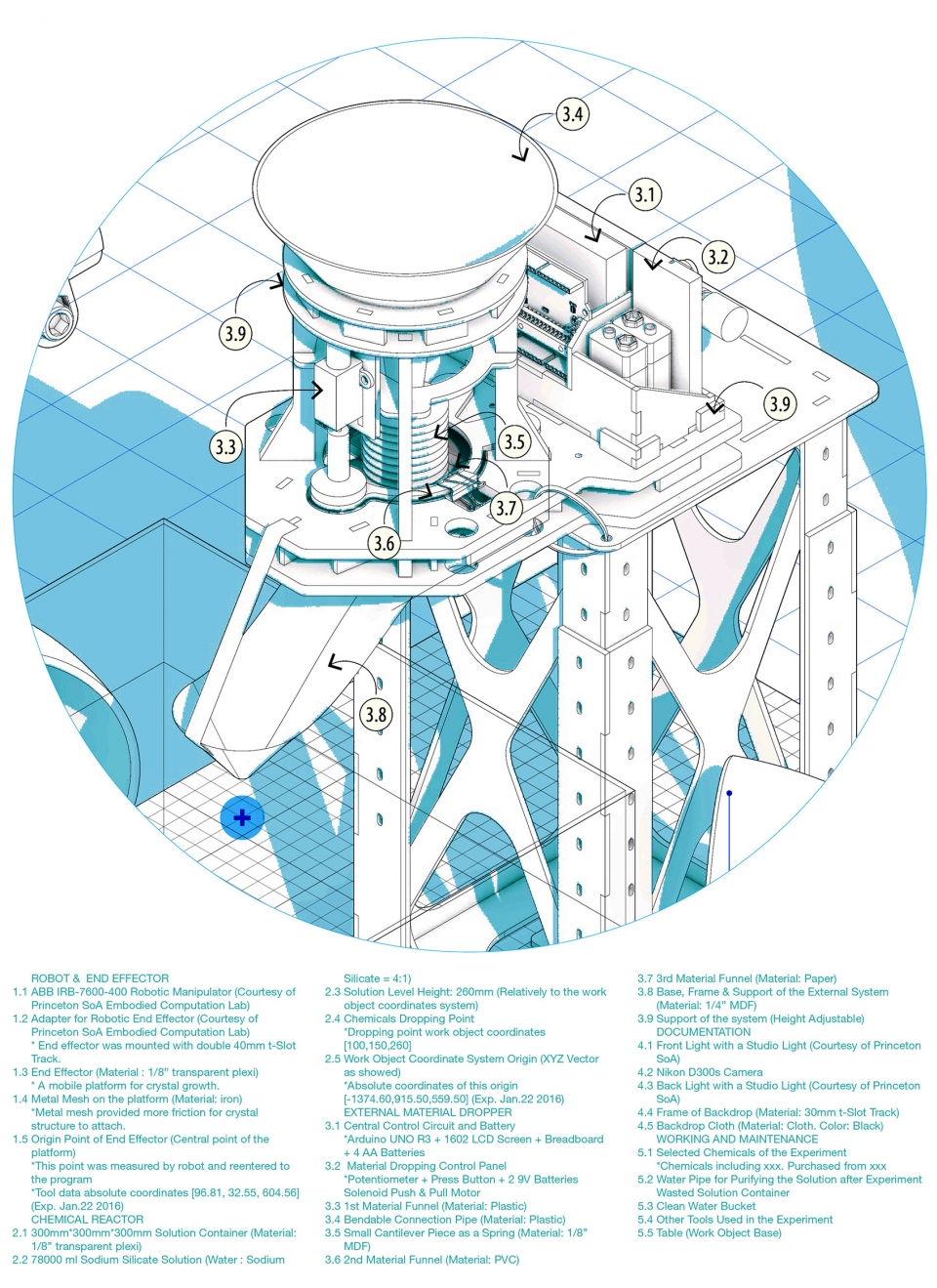
▼轴测细部,外部材料添加装置的设计,Isometric close-up, design of an external material dropper for the experiment
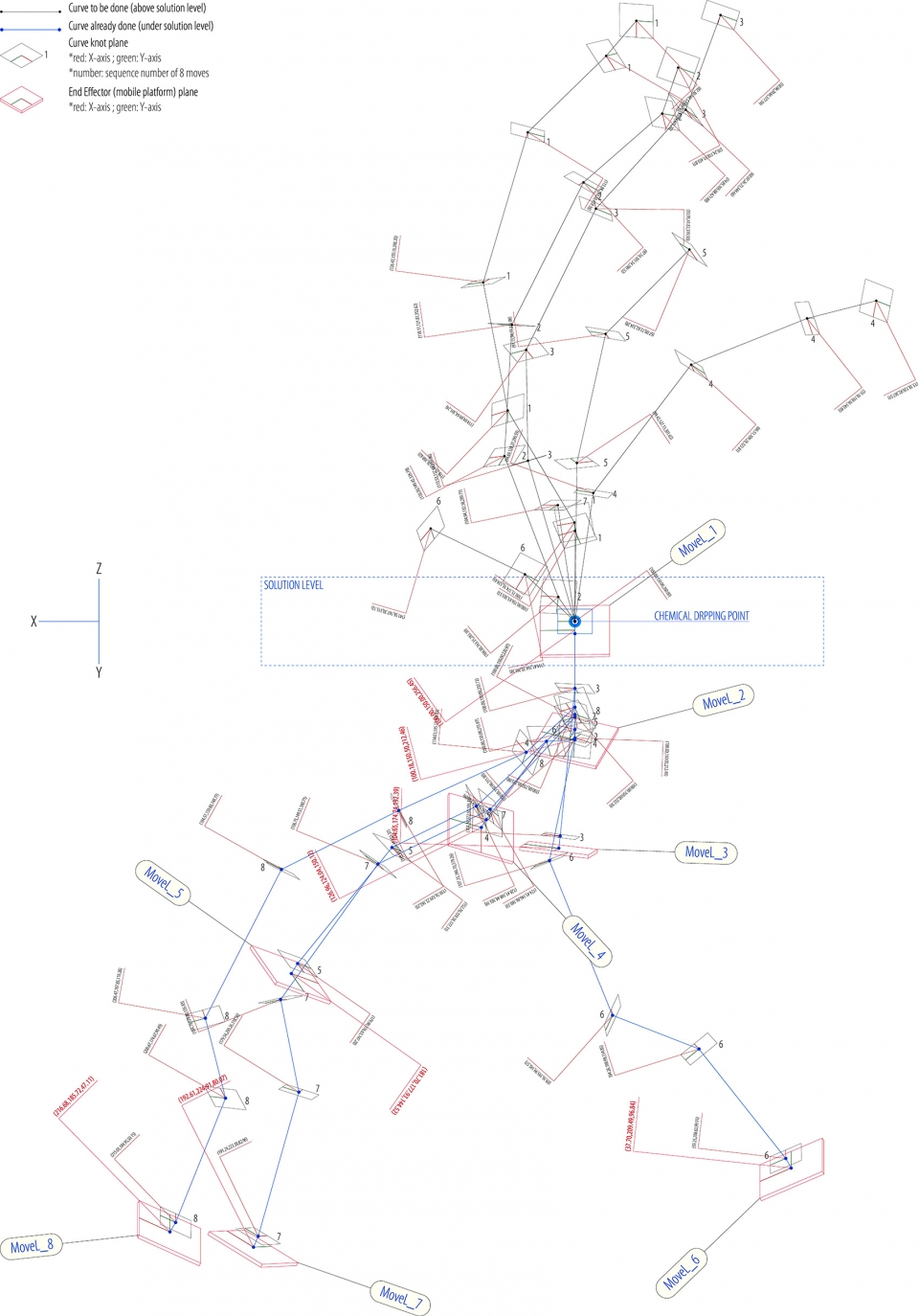
▼图解,机器末端工具头的规划路径以及对映的容器角度,Diagram, toopath of the end-effector and corresponding orientation of the reactor
▼建造,最终的机器干预过后的化学结晶过程,Fabrication, final chemical reaction result manipulated by robot

05.
最后我想分享一点工作过程的照片。我的研究整体上充满了机器,这些机器大部分没什么用——既不能投入产业,也通常不被认为和建筑学科有关。这些在手机里存了好久的照片,今天借着准备这篇稿子的机会,整理了几张与大家分享,希望大家开心。
Last but not least, I would like to share some work progress photos. My research is very robotic heavy, however the robot I made is often considered useless – neither can they be applied to industry, nor have they ever been considered as architecture. They have been left in oblivion in my phone for quite a while, and today when preparing this article, I pulled them out to share with you – hope you have fun viewing these images.



在海外时间:2015年至今
在海外地点:普林斯顿-波士顿
姓名:史纪
籍贯:北京
学校:普林斯顿大学
工作单位:KVA MATx
联系方式:shiji0325@gmail.com
When: 2015-present
Where: Princeton-Boston
Who: Ji Shi
From: Beijing
School: Princeton University
Firm: KVA MATx
Contact: shiji0325@gmail.com








有意思~~
硬核
耿直的采访回答 做的东西也很有意思 希望看到更多作品
这也是位蛤丝啊。。。。。
没有任何这样的意思,但是你一定要问我,你们呀
作为一个科幻迷加上建筑学学生对你这个很感兴趣 但在国内感觉根本不会有这种机会去接触 也许未来能成为趋势 希望你坚持下去
这技能树太硬核了,一般设计人员点不上去。。。
有意思~~